Motor Control GUI saomot_gui
To start the motor control GUI, type/usr/local/lick/bin/saomot_gui
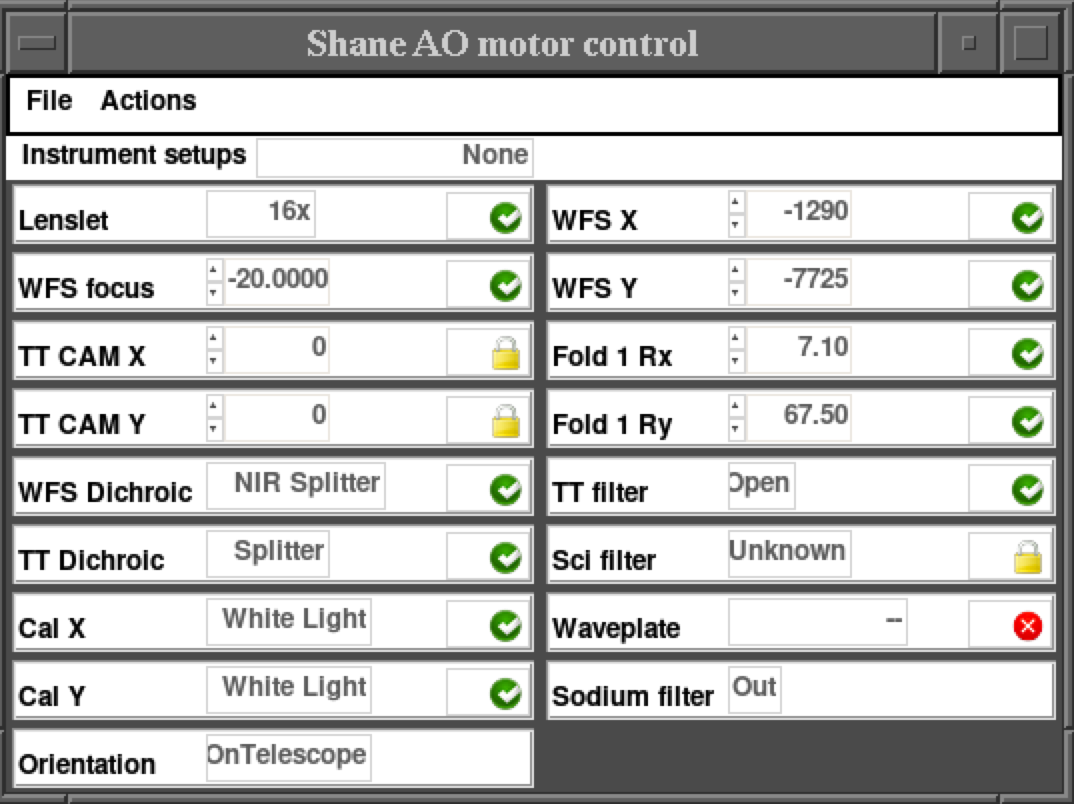
Once the GUI is up, the stages will all need to be calibrated. Stages can be calibrated one at a time by clicking the Calibrate button in the motor's detail panel or all at once using the Actions - Calibrate - All Stages menu item. Calibrating all at one time is not recommended at this time because the TT Cam X, TT Cam Y, Sci filter, and Waveplate motors are currently not installed.
Problems can occur with homing and there are known ways to deal with them as follows:
- TTCamX and TTCamY: These stages use brushless motors and have to
move significant weight against gravity. This means that sometimes
the stages won't home. If there is a problem homing, the first think
to try is just pushing the Calibrate button again. If that fails,
do the following procedure:
- Turn the TTCamX motor on:
modify -s saomot ctrl1aux='MG_BXF'
Then release the brake:
modify -s saomot ctrl1aux='BZF=-4'
Next push the Calibrate button again and it should home. - Turn the TTCamY motor on:
modify -s saomot ctrl1aux='MG_BXE'
Then release the brake:
modify -s saomot ctrl1aux='BZE=-4'
Next push the Calibrate button again and it should home.
- Turn the TTCamX motor on:
- FOLD 1 Rx and FOLD 1 Ry rarely have problems homing, but if
there is a problem, do the following:
- In the motor's detail panel set the mode to Jog ENGR.
- Set the speed to 2000.
- Wait for the motor to hit its forward limit.
- Push the Calibrate button.
- TT filter may give an error about the controller being non-responsive, e.g.
unable to successfully issue command: 'pos=2'
The solution is to cycle the filter wheel's power in the saopower_ui outlet C1. Then try moving to another filter (it may take more than one move to get communications established again). - Cal X may not find its index mark, giving the error "decel or stop due to REV limit switch". Solution is:
- Go to SAO and push on the stage perpendicular to its travel direction.
- Push the Calibrate button.
- WFS Y has absolute encoders, so homing is simple as the stage
doesn't move in the process, but it is possible that the three Y
motors get out of alignment with each other and will need to be
moved independently. The unfortunate side effect of when the WFS
Y motors halt due to misalignment is that the WFS X and WFS Focus
motor will also halt. To restore alignment between the Y motors
do the following:
- Go to https://mtham.ucolick.org/ShaneAO/saomot7/. This web site is password protected, so you'll need to use your mtham web acess credentials.
- Look at the WFS Cam Y section's second to last column
to determine the Y1-Y2 and Y1-Y3 values. If either is over
500 you'll need to change the Xmaxdif value (from shark or
shred):
saomot.io ctrl7aux='Xdifmax=1000' - In the WFS Cam Y section, at the lower left, change Assembly to Unlinked.
- Change to Pos Mode.
- Turn motor on.
- Move a misaligned motor (either Y2 or Y3) a small amount (e.g. 100 counts) to make sure the motor is moving and moving in the right direction. I.e. if Y1-Y3=-350 the direction and amount to move Y3 is -350 to get back in alignment. If the small move is successful, complete the move so that the difference is 0.
- Repeat above for the other axis if necessary.
- Change Assembly back to Linked.
- Set Xdifmax back to 500:
saomot.io ctrl7aux='Xdifmax=500' - Move WFS Y stage to desired position.
- For both WFS X and WFS Focus, set mode back to POS and turn the motors On. Then set them back to the desired positions.
Also be sure to set the Orientation to OnTelescope.